1.1. Linear Models¶
The following are a set of methods intended for regression in which the target value is expected to be a linear combination of the features. In mathematical notation, if \(\hat{y}\) is the predicted value.
Across the module, we designate the vector \(w = (w_1,
..., w_p)\) as coef_ and \(w_0\) as intercept_.
To perform classification with generalized linear models, see Logistic regression.
1.1.1. Ordinary Least Squares¶
LinearRegression fits a linear model with coefficients
\(w = (w_1, ..., w_p)\) to minimize the residual sum
of squares between the observed targets in the dataset, and the
targets predicted by the linear approximation. Mathematically it
solves a problem of the form:
LinearRegression will take in its fit method arrays X, y
and will store the coefficients \(w\) of the linear model in its
coef_ member:
>>> from sklearn import linear_model
>>> reg = linear_model.LinearRegression()
>>> reg.fit([[0, 0], [1, 1], [2, 2]], [0, 1, 2])
LinearRegression()
>>> reg.coef_
array([0.5, 0.5])
The coefficient estimates for Ordinary Least Squares rely on the independence of the features. When features are correlated and the columns of the design matrix \(X\) have an approximate linear dependence, the design matrix becomes close to singular and as a result, the least-squares estimate becomes highly sensitive to random errors in the observed target, producing a large variance. This situation of multicollinearity can arise, for example, when data are collected without an experimental design.
Examples:
1.1.1.1. Ordinary Least Squares Complexity¶
The least squares solution is computed using the singular value
decomposition of X. If X is a matrix of shape (n_samples, n_features)
this method has a cost of
\(O(n_{\text{samples}} n_{\text{features}}^2)\), assuming that
\(n_{\text{samples}} \geq n_{\text{features}}\).
1.1.2. Ridge regression and classification¶
1.1.2.1. Regression¶
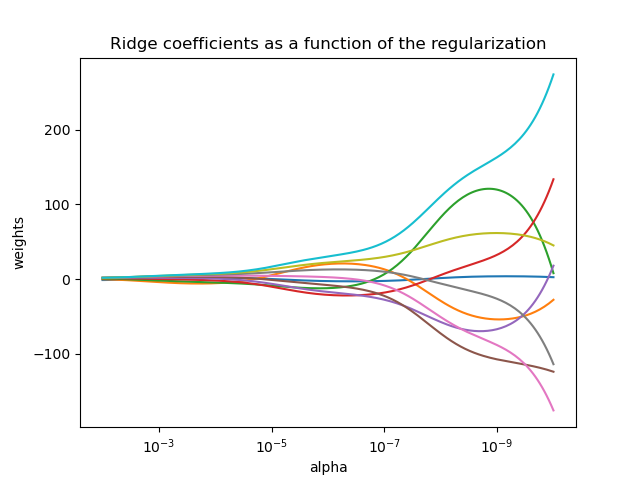
Ridge regression addresses some of the problems of
Ordinary Least Squares by imposing a penalty on the size of the
coefficients. The ridge coefficients minimize a penalized residual sum
of squares:
The complexity parameter \(\alpha \geq 0\) controls the amount of shrinkage: the larger the value of \(\alpha\), the greater the amount of shrinkage and thus the coefficients become more robust to collinearity.
As with other linear models, Ridge will take in its fit method
arrays X, y and will store the coefficients \(w\) of the linear model in
its coef_ member:
>>> from sklearn import linear_model
>>> reg = linear_model.Ridge(alpha=.5)
>>> reg.fit([[0, 0], [0, 0], [1, 1]], [0, .1, 1])
Ridge(alpha=0.5)
>>> reg.coef_
array([0.34545455, 0.34545455])
>>> reg.intercept_
0.13636...
1.1.2.2. Classification¶
The Ridge regressor has a classifier variant:
RidgeClassifier. This classifier first converts binary targets to
{-1, 1} and then treats the problem as a regression task, optimizing the
same objective as above. The predicted class corresponds to the sign of the
regressor’s prediction. For multiclass classification, the problem is
treated as multi-output regression, and the predicted class corresponds to
the output with the highest value.
It might seem questionable to use a (penalized) Least Squares loss to fit a
classification model instead of the more traditional logistic or hinge
losses. However in practice all those models can lead to similar
cross-validation scores in terms of accuracy or precision/recall, while the
penalized least squares loss used by the RidgeClassifier allows for
a very different choice of the numerical solvers with distinct computational
performance profiles.
The RidgeClassifier can be significantly faster than e.g.
LogisticRegression with a high number of classes, because it is
able to compute the projection matrix \((X^T X)^{-1} X^T\) only once.
This classifier is sometimes referred to as a Least Squares Support Vector Machines with a linear kernel.
1.1.2.3. Ridge Complexity¶
This method has the same order of complexity as Ordinary Least Squares.
1.1.2.4. Setting the regularization parameter: generalized Cross-Validation¶
RidgeCV implements ridge regression with built-in
cross-validation of the alpha parameter. The object works in the same way
as GridSearchCV except that it defaults to Generalized Cross-Validation
(GCV), an efficient form of leave-one-out cross-validation:
>>> import numpy as np
>>> from sklearn import linear_model
>>> reg = linear_model.RidgeCV(alphas=np.logspace(-6, 6, 13))
>>> reg.fit([[0, 0], [0, 0], [1, 1]], [0, .1, 1])
RidgeCV(alphas=array([1.e-06, 1.e-05, 1.e-04, 1.e-03, 1.e-02, 1.e-01, 1.e+00, 1.e+01,
1.e+02, 1.e+03, 1.e+04, 1.e+05, 1.e+06]))
>>> reg.alpha_
0.01
Specifying the value of the cv attribute will trigger the use of
cross-validation with GridSearchCV, for
example cv=10 for 10-fold cross-validation, rather than Generalized
Cross-Validation.
References
“Notes on Regularized Least Squares”, Rifkin & Lippert (technical report, course slides).
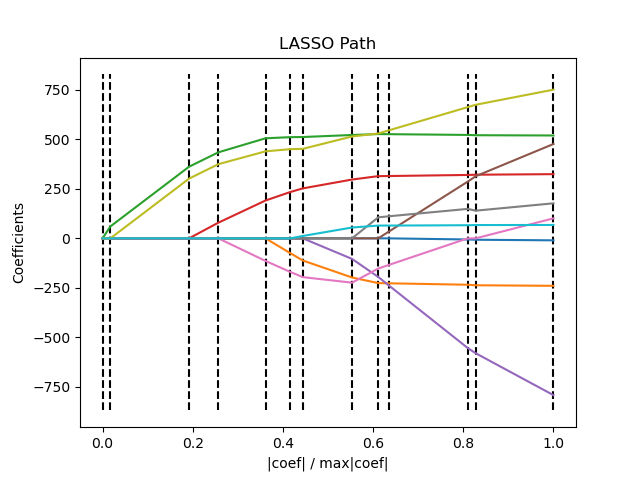
1.1.3. Lasso¶
The Lasso is a linear model that estimates sparse coefficients.
It is useful in some contexts due to its tendency to prefer solutions
with fewer non-zero coefficients, effectively reducing the number of
features upon which the given solution is dependent. For this reason
Lasso and its variants are fundamental to the field of compressed sensing.
Under certain conditions, it can recover the exact set of non-zero
coefficients (see
Compressive sensing: tomography reconstruction with L1 prior (Lasso)).
Mathematically, it consists of a linear model with an added regularization term. The objective function to minimize is:
The lasso estimate thus solves the minimization of the least-squares penalty with \(\alpha ||w||_1\) added, where \(\alpha\) is a constant and \(||w||_1\) is the \(\ell_1\)-norm of the coefficient vector.
The implementation in the class Lasso uses coordinate descent as
the algorithm to fit the coefficients. See Least Angle Regression
for another implementation:
>>> from sklearn import linear_model
>>> reg = linear_model.Lasso(alpha=0.1)
>>> reg.fit([[0, 0], [1, 1]], [0, 1])
Lasso(alpha=0.1)
>>> reg.predict([[1, 1]])
array([0.8])
The function lasso_path is useful for lower-level tasks, as it
computes the coefficients along the full path of possible values.
Examples:
Note
Feature selection with Lasso
As the Lasso regression yields sparse models, it can thus be used to perform feature selection, as detailed in L1-based feature selection.
The following two references explain the iterations used in the coordinate descent solver of scikit-learn, as well as the duality gap computation used for convergence control.
References
“Regularization Path For Generalized linear Models by Coordinate Descent”, Friedman, Hastie & Tibshirani, J Stat Softw, 2010 (Paper).
“An Interior-Point Method for Large-Scale L1-Regularized Least Squares,” S. J. Kim, K. Koh, M. Lustig, S. Boyd and D. Gorinevsky, in IEEE Journal of Selected Topics in Signal Processing, 2007 (Paper)
1.1.3.1. Setting regularization parameter¶
The alpha parameter controls the degree of sparsity of the estimated
coefficients.
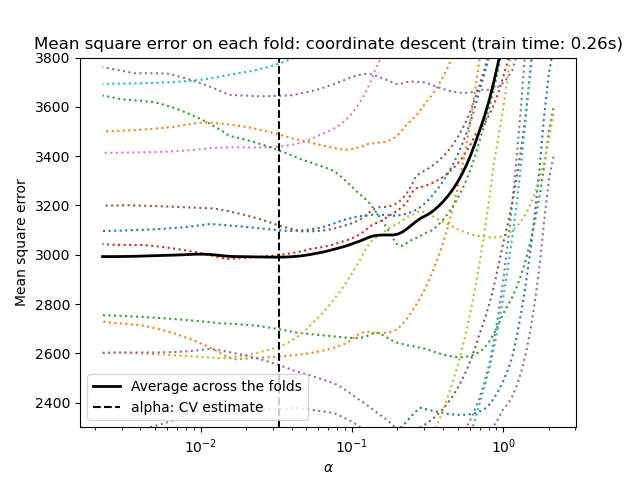
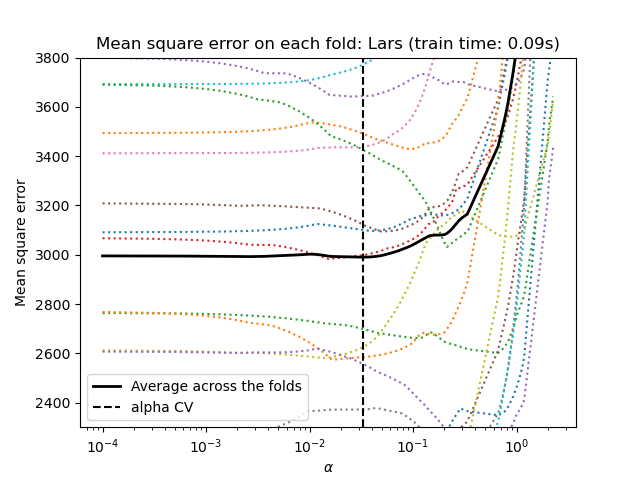
1.1.3.1.1. Using cross-validation¶
scikit-learn exposes objects that set the Lasso alpha parameter by
cross-validation: LassoCV and LassoLarsCV.
LassoLarsCV is based on the Least Angle Regression algorithm
explained below.
For high-dimensional datasets with many collinear features,
LassoCV is most often preferable. However, LassoLarsCV has
the advantage of exploring more relevant values of alpha parameter, and
if the number of samples is very small compared to the number of
features, it is often faster than LassoCV.
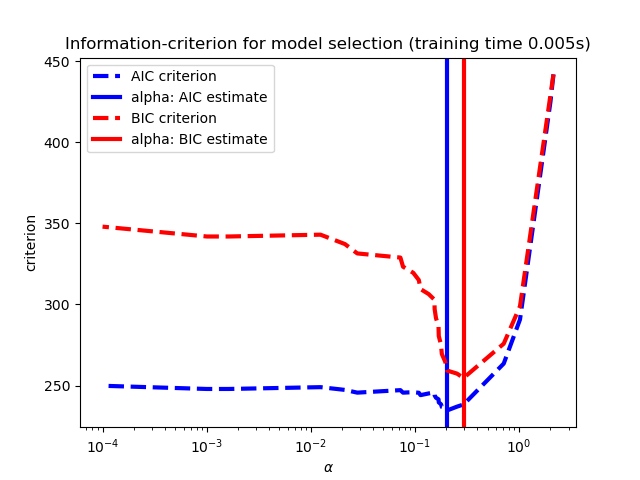
1.1.3.1.2. Information-criteria based model selection¶
Alternatively, the estimator LassoLarsIC proposes to use the
Akaike information criterion (AIC) and the Bayes Information criterion (BIC).
It is a computationally cheaper alternative to find the optimal value of alpha
as the regularization path is computed only once instead of k+1 times
when using k-fold cross-validation. However, such criteria needs a
proper estimation of the degrees of freedom of the solution, are
derived for large samples (asymptotic results) and assume the model
is correct, i.e. that the data are actually generated by this model.
They also tend to break when the problem is badly conditioned
(more features than samples).
1.1.3.1.3. Comparison with the regularization parameter of SVM¶
The equivalence between alpha and the regularization parameter of SVM,
C is given by alpha = 1 / C or alpha = 1 / (n_samples * C),
depending on the estimator and the exact objective function optimized by the
model.
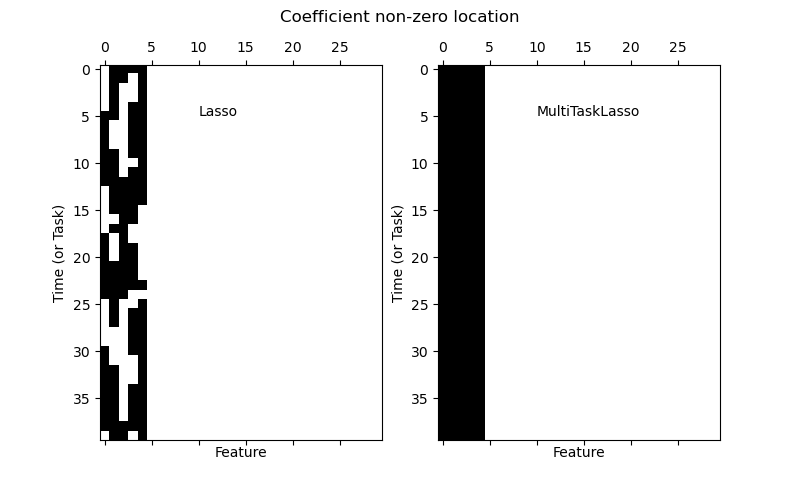
1.1.4. Multi-task Lasso¶
The MultiTaskLasso is a linear model that estimates sparse
coefficients for multiple regression problems jointly: y is a 2D array,
of shape (n_samples, n_tasks). The constraint is that the selected
features are the same for all the regression problems, also called tasks.
The following figure compares the location of the non-zero entries in the coefficient matrix W obtained with a simple Lasso or a MultiTaskLasso. The Lasso estimates yield scattered non-zeros while the non-zeros of the MultiTaskLasso are full columns.
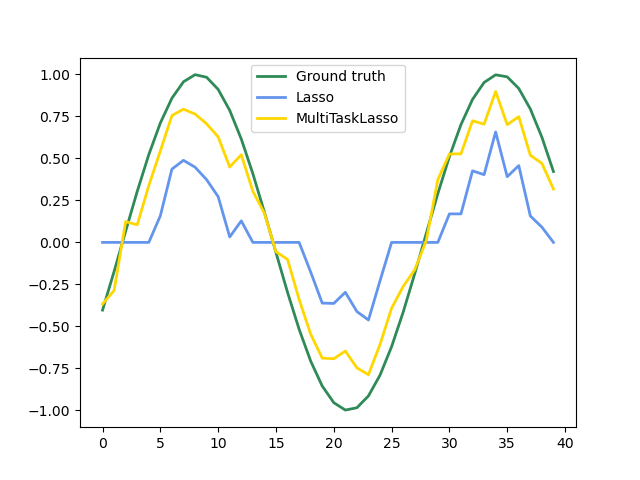
Fitting a time-series model, imposing that any active feature be active at all times.
Mathematically, it consists of a linear model trained with a mixed \(\ell_1\) \(\ell_2\)-norm for regularization. The objective function to minimize is:
where \(\text{Fro}\) indicates the Frobenius norm
and \(\ell_1\) \(\ell_2\) reads
The implementation in the class MultiTaskLasso uses
coordinate descent as the algorithm to fit the coefficients.
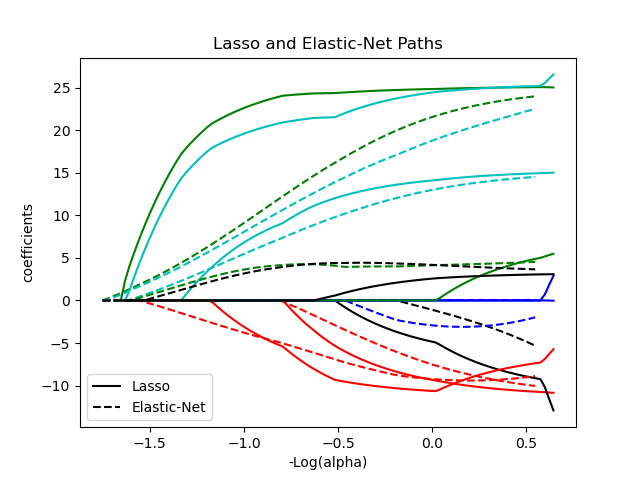
1.1.5. Elastic-Net¶
ElasticNet is a linear regression model trained with both
\(\ell_1\) and \(\ell_2\)-norm regularization of the coefficients.
This combination allows for learning a sparse model where few of
the weights are non-zero like Lasso, while still maintaining
the regularization properties of Ridge. We control the convex
combination of \(\ell_1\) and \(\ell_2\) using the l1_ratio
parameter.
Elastic-net is useful when there are multiple features which are correlated with one another. Lasso is likely to pick one of these at random, while elastic-net is likely to pick both.
A practical advantage of trading-off between Lasso and Ridge is that it allows Elastic-Net to inherit some of Ridge’s stability under rotation.
The objective function to minimize is in this case
The class ElasticNetCV can be used to set the parameters
alpha (\(\alpha\)) and l1_ratio (\(\rho\)) by cross-validation.
The following two references explain the iterations used in the coordinate descent solver of scikit-learn, as well as the duality gap computation used for convergence control.
References
“Regularization Path For Generalized linear Models by Coordinate Descent”, Friedman, Hastie & Tibshirani, J Stat Softw, 2010 (Paper).
“An Interior-Point Method for Large-Scale L1-Regularized Least Squares,” S. J. Kim, K. Koh, M. Lustig, S. Boyd and D. Gorinevsky, in IEEE Journal of Selected Topics in Signal Processing, 2007 (Paper)
1.1.6. Multi-task Elastic-Net¶
The MultiTaskElasticNet is an elastic-net model that estimates sparse
coefficients for multiple regression problems jointly: Y is a 2D array
of shape (n_samples, n_tasks). The constraint is that the selected
features are the same for all the regression problems, also called tasks.
Mathematically, it consists of a linear model trained with a mixed \(\ell_1\) \(\ell_2\)-norm and \(\ell_2\)-norm for regularization. The objective function to minimize is:
The implementation in the class MultiTaskElasticNet uses coordinate descent as
the algorithm to fit the coefficients.
The class MultiTaskElasticNetCV can be used to set the parameters
alpha (\(\alpha\)) and l1_ratio (\(\rho\)) by cross-validation.
1.1.7. Least Angle Regression¶
Least-angle regression (LARS) is a regression algorithm for high-dimensional data, developed by Bradley Efron, Trevor Hastie, Iain Johnstone and Robert Tibshirani. LARS is similar to forward stepwise regression. At each step, it finds the feature most correlated with the target. When there are multiple features having equal correlation, instead of continuing along the same feature, it proceeds in a direction equiangular between the features.
The advantages of LARS are:
It is numerically efficient in contexts where the number of features is significantly greater than the number of samples.
It is computationally just as fast as forward selection and has the same order of complexity as ordinary least squares.
It produces a full piecewise linear solution path, which is useful in cross-validation or similar attempts to tune the model.
If two features are almost equally correlated with the target, then their coefficients should increase at approximately the same rate. The algorithm thus behaves as intuition would expect, and also is more stable.
It is easily modified to produce solutions for other estimators, like the Lasso.
The disadvantages of the LARS method include:
Because LARS is based upon an iterative refitting of the residuals, it would appear to be especially sensitive to the effects of noise. This problem is discussed in detail by Weisberg in the discussion section of the Efron et al. (2004) Annals of Statistics article.
The LARS model can be used using estimator Lars, or its
low-level implementation lars_path or lars_path_gram.
1.1.8. LARS Lasso¶
LassoLars is a lasso model implemented using the LARS
algorithm, and unlike the implementation based on coordinate descent,
this yields the exact solution, which is piecewise linear as a
function of the norm of its coefficients.
>>> from sklearn import linear_model
>>> reg = linear_model.LassoLars(alpha=.1)
>>> reg.fit([[0, 0], [1, 1]], [0, 1])
LassoLars(alpha=0.1)
>>> reg.coef_
array([0.717157..., 0. ])
Examples:
The Lars algorithm provides the full path of the coefficients along
the regularization parameter almost for free, thus a common operation
is to retrieve the path with one of the functions lars_path
or lars_path_gram.
1.1.8.1. Mathematical formulation¶
The algorithm is similar to forward stepwise regression, but instead of including features at each step, the estimated coefficients are increased in a direction equiangular to each one’s correlations with the residual.
Instead of giving a vector result, the LARS solution consists of a
curve denoting the solution for each value of the \(\ell_1\) norm of the
parameter vector. The full coefficients path is stored in the array
coef_path_, which has size (n_features, max_features+1). The first
column is always zero.
References:
Original Algorithm is detailed in the paper Least Angle Regression by Hastie et al.
1.1.9. Orthogonal Matching Pursuit (OMP)¶
OrthogonalMatchingPursuit and orthogonal_mp implements the OMP
algorithm for approximating the fit of a linear model with constraints imposed
on the number of non-zero coefficients (ie. the \(\ell_0\) pseudo-norm).
Being a forward feature selection method like Least Angle Regression, orthogonal matching pursuit can approximate the optimum solution vector with a fixed number of non-zero elements:
Alternatively, orthogonal matching pursuit can target a specific error instead of a specific number of non-zero coefficients. This can be expressed as:
OMP is based on a greedy algorithm that includes at each step the atom most highly correlated with the current residual. It is similar to the simpler matching pursuit (MP) method, but better in that at each iteration, the residual is recomputed using an orthogonal projection on the space of the previously chosen dictionary elements.
Examples:
References:
1.1.10. Bayesian Regression¶
Bayesian regression techniques can be used to include regularization parameters in the estimation procedure: the regularization parameter is not set in a hard sense but tuned to the data at hand.
This can be done by introducing uninformative priors
over the hyper parameters of the model.
The \(\ell_{2}\) regularization used in Ridge regression and classification is
equivalent to finding a maximum a posteriori estimation under a Gaussian prior
over the coefficients \(w\) with precision \(\lambda^{-1}\).
Instead of setting lambda manually, it is possible to treat it as a random
variable to be estimated from the data.
To obtain a fully probabilistic model, the output \(y\) is assumed to be Gaussian distributed around \(X w\):
where \(\alpha\) is again treated as a random variable that is to be estimated from the data.
The advantages of Bayesian Regression are:
It adapts to the data at hand.
It can be used to include regularization parameters in the estimation procedure.
The disadvantages of Bayesian regression include:
Inference of the model can be time consuming.
References
A good introduction to Bayesian methods is given in C. Bishop: Pattern Recognition and Machine learning
Original Algorithm is detailed in the book
Bayesian learning for neural networksby Radford M. Neal
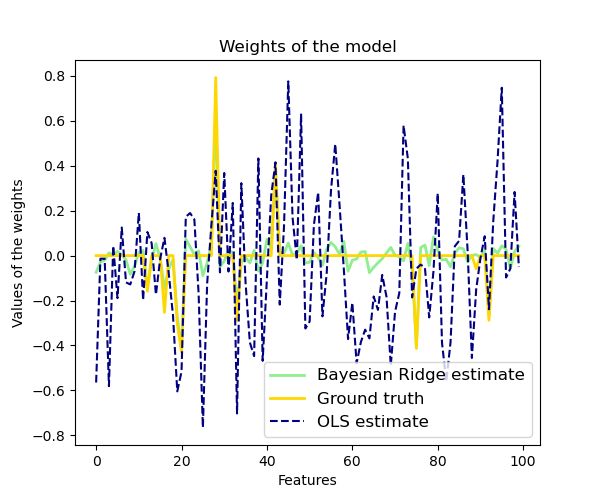
1.1.10.1. Bayesian Ridge Regression¶
BayesianRidge estimates a probabilistic model of the
regression problem as described above.
The prior for the coefficient \(w\) is given by a spherical Gaussian:
The priors over \(\alpha\) and \(\lambda\) are chosen to be gamma
distributions, the
conjugate prior for the precision of the Gaussian. The resulting model is
called Bayesian Ridge Regression, and is similar to the classical
Ridge.
The parameters \(w\), \(\alpha\) and \(\lambda\) are estimated
jointly during the fit of the model, the regularization parameters
\(\alpha\) and \(\lambda\) being estimated by maximizing the
log marginal likelihood. The scikit-learn implementation
is based on the algorithm described in Appendix A of (Tipping, 2001)
where the update of the parameters \(\alpha\) and \(\lambda\) is done
as suggested in (MacKay, 1992). The initial value of the maximization procedure
can be set with the hyperparameters alpha_init and lambda_init.
There are four more hyperparameters, \(\alpha_1\), \(\alpha_2\), \(\lambda_1\) and \(\lambda_2\) of the gamma prior distributions over \(\alpha\) and \(\lambda\). These are usually chosen to be non-informative. By default \(\alpha_1 = \alpha_2 = \lambda_1 = \lambda_2 = 10^{-6}\).
Bayesian Ridge Regression is used for regression:
>>> from sklearn import linear_model
>>> X = [[0., 0.], [1., 1.], [2., 2.], [3., 3.]]
>>> Y = [0., 1., 2., 3.]
>>> reg = linear_model.BayesianRidge()
>>> reg.fit(X, Y)
BayesianRidge()
After being fitted, the model can then be used to predict new values:
>>> reg.predict([[1, 0.]])
array([0.50000013])
The coefficients \(w\) of the model can be accessed:
>>> reg.coef_
array([0.49999993, 0.49999993])
Due to the Bayesian framework, the weights found are slightly different to the ones found by Ordinary Least Squares. However, Bayesian Ridge Regression is more robust to ill-posed problems.
References:
Section 3.3 in Christopher M. Bishop: Pattern Recognition and Machine Learning, 2006
David J. C. MacKay, Bayesian Interpolation, 1992.
Michael E. Tipping, Sparse Bayesian Learning and the Relevance Vector Machine, 2001.
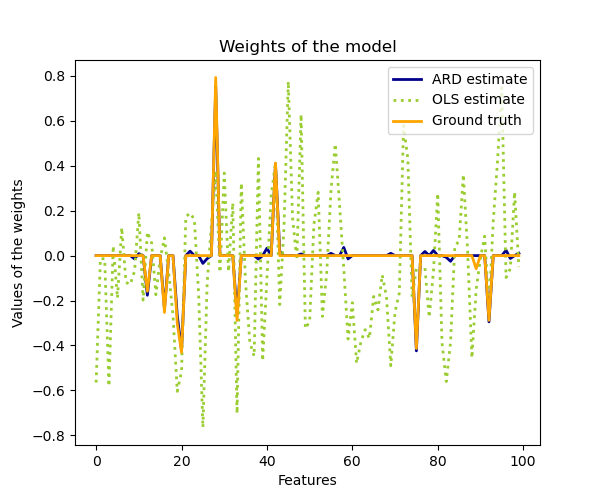
1.1.10.2. Automatic Relevance Determination - ARD¶
ARDRegression is very similar to Bayesian Ridge Regression,
but can lead to sparser coefficients \(w\) 1 2.
ARDRegression poses a different prior over \(w\), by dropping the
assumption of the Gaussian being spherical.
Instead, the distribution over \(w\) is assumed to be an axis-parallel, elliptical Gaussian distribution.
This means each coefficient \(w_{i}\) is drawn from a Gaussian distribution, centered on zero and with a precision \(\lambda_{i}\):
with \(\text{diag}(A) = \lambda = \{\lambda_{1},...,\lambda_{p}\}\).
In contrast to Bayesian Ridge Regression, each coordinate of \(w_{i}\) has its own standard deviation \(\lambda_i\). The prior over all \(\lambda_i\) is chosen to be the same gamma distribution given by hyperparameters \(\lambda_1\) and \(\lambda_2\).
ARD is also known in the literature as Sparse Bayesian Learning and Relevance Vector Machine 3 4.
References:
- 1
Christopher M. Bishop: Pattern Recognition and Machine Learning, Chapter 7.2.1
- 2
David Wipf and Srikantan Nagarajan: A new view of automatic relevance determination
- 3
Michael E. Tipping: Sparse Bayesian Learning and the Relevance Vector Machine
- 4
Tristan Fletcher: Relevance Vector Machines explained
1.1.11. Logistic regression¶
Logistic regression, despite its name, is a linear model for classification rather than regression. Logistic regression is also known in the literature as logit regression, maximum-entropy classification (MaxEnt) or the log-linear classifier. In this model, the probabilities describing the possible outcomes of a single trial are modeled using a logistic function.
Logistic regression is implemented in LogisticRegression.
This implementation can fit binary, One-vs-Rest, or multinomial logistic
regression with optional \(\ell_1\), \(\ell_2\) or Elastic-Net
regularization.
Note
Regularization is applied by default, which is common in machine learning but not in statistics. Another advantage of regularization is that it improves numerical stability. No regularization amounts to setting C to a very high value.
As an optimization problem, binary class \(\ell_2\) penalized logistic regression minimizes the following cost function:
Similarly, \(\ell_1\) regularized logistic regression solves the following optimization problem:
Elastic-Net regularization is a combination of \(\ell_1\) and \(\ell_2\), and minimizes the following cost function:
where \(\rho\) controls the strength of \(\ell_1\) regularization vs.
\(\ell_2\) regularization (it corresponds to the l1_ratio parameter).
Note that, in this notation, it’s assumed that the target \(y_i\) takes values in the set \({-1, 1}\) at trial \(i\). We can also see that Elastic-Net is equivalent to \(\ell_1\) when \(\rho = 1\) and equivalent to \(\ell_2\) when \(\rho=0\).
The solvers implemented in the class LogisticRegression
are “liblinear”, “newton-cg”, “lbfgs”, “sag” and “saga”:
The solver “liblinear” uses a coordinate descent (CD) algorithm, and relies
on the excellent C++ LIBLINEAR library, which is shipped with
scikit-learn. However, the CD algorithm implemented in liblinear cannot learn
a true multinomial (multiclass) model; instead, the optimization problem is
decomposed in a “one-vs-rest” fashion so separate binary classifiers are
trained for all classes. This happens under the hood, so
LogisticRegression instances using this solver behave as multiclass
classifiers. For \(\ell_1\) regularization sklearn.svm.l1_min_c allows to
calculate the lower bound for C in order to get a non “null” (all feature
weights to zero) model.
The “lbfgs”, “sag” and “newton-cg” solvers only support \(\ell_2\)
regularization or no regularization, and are found to converge faster for some
high-dimensional data. Setting multi_class to “multinomial” with these solvers
learns a true multinomial logistic regression model 5, which means that its
probability estimates should be better calibrated than the default “one-vs-rest”
setting.
The “sag” solver uses Stochastic Average Gradient descent 6. It is faster than other solvers for large datasets, when both the number of samples and the number of features are large.
The “saga” solver 7 is a variant of “sag” that also supports the
non-smooth penalty="l1". This is therefore the solver of choice for sparse
multinomial logistic regression. It is also the only solver that supports
penalty="elasticnet".
The “lbfgs” is an optimization algorithm that approximates the Broyden–Fletcher–Goldfarb–Shanno algorithm 8, which belongs to quasi-Newton methods. The “lbfgs” solver is recommended for use for small data-sets but for larger datasets its performance suffers. 9
The following table summarizes the penalties supported by each solver:
Solvers |
|||||
Penalties |
‘liblinear’ |
‘lbfgs’ |
‘newton-cg’ |
‘sag’ |
‘saga’ |
Multinomial + L2 penalty |
no |
yes |
yes |
yes |
yes |
OVR + L2 penalty |
yes |
yes |
yes |
yes |
yes |
Multinomial + L1 penalty |
no |
no |
no |
no |
yes |
OVR + L1 penalty |
yes |
no |
no |
no |
yes |
Elastic-Net |
no |
no |
no |
no |
yes |
No penalty (‘none’) |
no |
yes |
yes |
yes |
yes |
Behaviors |
|||||
Penalize the intercept (bad) |
yes |
no |
no |
no |
no |
Faster for large datasets |
no |
no |
no |
yes |
yes |
Robust to unscaled datasets |
yes |
yes |
yes |
no |
no |
The “lbfgs” solver is used by default for its robustness. For large datasets
the “saga” solver is usually faster.
For large dataset, you may also consider using SGDClassifier
with ‘log’ loss, which might be even faster but requires more tuning.
Examples:
Differences from liblinear:
There might be a difference in the scores obtained between
LogisticRegression with solver=liblinear
or LinearSVC and the external liblinear library directly,
when fit_intercept=False and the fit coef_ (or) the data to
be predicted are zeroes. This is because for the sample(s) with
decision_function zero, LogisticRegression and LinearSVC
predict the negative class, while liblinear predicts the positive class.
Note that a model with fit_intercept=False and having many samples with
decision_function zero, is likely to be a underfit, bad model and you are
advised to set fit_intercept=True and increase the intercept_scaling.
Note
Feature selection with sparse logistic regression
A logistic regression with \(\ell_1\) penalty yields sparse models, and can thus be used to perform feature selection, as detailed in L1-based feature selection.
Note
P-value estimation
It is possible to obtain the p-values and confidence intervals for
coefficients in cases of regression without penalization. The statsmodels
package <https://pypi.org/project/statsmodels/> natively supports this.
Within sklearn, one could use bootstrapping instead as well.
LogisticRegressionCV implements Logistic Regression with built-in
cross-validation support, to find the optimal C and l1_ratio parameters
according to the scoring attribute. The “newton-cg”, “sag”, “saga” and
“lbfgs” solvers are found to be faster for high-dimensional dense data, due
to warm-starting (see Glossary).
References:
- 5
Christopher M. Bishop: Pattern Recognition and Machine Learning, Chapter 4.3.4
- 6
Mark Schmidt, Nicolas Le Roux, and Francis Bach: Minimizing Finite Sums with the Stochastic Average Gradient.
- 7
Aaron Defazio, Francis Bach, Simon Lacoste-Julien: SAGA: A Fast Incremental Gradient Method With Support for Non-Strongly Convex Composite Objectives.
- 8
https://en.wikipedia.org/wiki/Broyden%E2%80%93Fletcher%E2%80%93Goldfarb%E2%80%93Shanno_algorithm
- 9
1.1.12. Generalized Linear Regression¶
Generalized Linear Models (GLM) extend linear models in two ways 10. First, the predicted values \(\hat{y}\) are linked to a linear combination of the input variables \(X\) via an inverse link function \(h\) as
Secondly, the squared loss function is replaced by the unit deviance \(d\) of a distribution in the exponential family (or more precisely, a reproductive exponential dispersion model (EDM) 11).
The minimization problem becomes:
where \(\alpha\) is the L2 regularization penalty. When sample weights are provided, the average becomes a weighted average.
The following table lists some specific EDMs and their unit deviance (all of these are instances of the Tweedie family):
Distribution |
Target Domain |
Unit Deviance \(d(y, \hat{y})\) |
|---|---|---|
Normal |
\(y \in (-\infty, \infty)\) |
\((y-\hat{y})^2\) |
Poisson |
\(y \in [0, \infty)\) |
\(2(y\log\frac{y}{\hat{y}}-y+\hat{y})\) |
Gamma |
\(y \in (0, \infty)\) |
\(2(\log\frac{\hat{y}}{y}+\frac{y}{\hat{y}}-1)\) |
Inverse Gaussian |
\(y \in (0, \infty)\) |
\(\frac{(y-\hat{y})^2}{y\hat{y}^2}\) |
The Probability Density Functions (PDF) of these distributions are illustrated in the following figure,
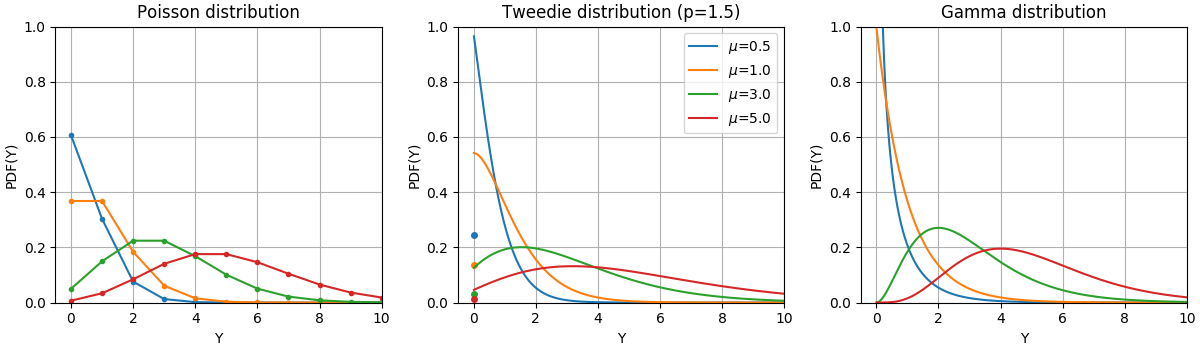
PDF of a random variable Y following Poisson, Tweedie (power=1.5) and Gamma distributions with different mean values (\(\mu\)). Observe the point mass at \(Y=0\) for the Poisson distribution and the Tweedie (power=1.5) distribution, but not for the Gamma distribution which has a strictly positive target domain.¶
The choice of the distribution depends on the problem at hand:
If the target values \(y\) are counts (non-negative integer valued) or relative frequencies (non-negative), you might use a Poisson deviance with log-link.
If the target values are positive valued and skewed, you might try a Gamma deviance with log-link.
If the target values seem to be heavier tailed than a Gamma distribution, you might try an Inverse Gaussian deviance (or even higher variance powers of the Tweedie family).
Examples of use cases include:
Agriculture / weather modeling: number of rain events per year (Poisson), amount of rainfall per event (Gamma), total rainfall per year (Tweedie / Compound Poisson Gamma).
Risk modeling / insurance policy pricing: number of claim events / policyholder per year (Poisson), cost per event (Gamma), total cost per policyholder per year (Tweedie / Compound Poisson Gamma).
Predictive maintenance: number of production interruption events per year (Poisson), duration of interruption (Gamma), total interruption time per year (Tweedie / Compound Poisson Gamma).
References:
- 10
McCullagh, Peter; Nelder, John (1989). Generalized Linear Models, Second Edition. Boca Raton: Chapman and Hall/CRC. ISBN 0-412-31760-5.
- 11
Jørgensen, B. (1992). The theory of exponential dispersion models and analysis of deviance. Monografias de matemática, no. 51. See also Exponential dispersion model.
1.1.12.1. Usage¶
TweedieRegressor implements a generalized linear model for the
Tweedie distribution, that allows to model any of the above mentioned
distributions using the appropriate power parameter. In particular:
power = 0: Normal distribution. Specific estimators such asRidge,ElasticNetare generally more appropriate in this case.power = 1: Poisson distribution.PoissonRegressoris exposed for convenience. However, it is strictly equivalent toTweedieRegressor(power=1, link='log').power = 2: Gamma distribution.GammaRegressoris exposed for convenience. However, it is strictly equivalent toTweedieRegressor(power=2, link='log').power = 3: Inverse Gaussian distribution.
The link function is determined by the link parameter.
Usage example:
>>> from sklearn.linear_model import TweedieRegressor
>>> reg = TweedieRegressor(power=1, alpha=0.5, link='log')
>>> reg.fit([[0, 0], [0, 1], [2, 2]], [0, 1, 2])
TweedieRegressor(alpha=0.5, link='log', power=1)
>>> reg.coef_
array([0.2463..., 0.4337...])
>>> reg.intercept_
-0.7638...
1.1.12.2. Practical considerations¶
The feature matrix X should be standardized before fitting. This ensures
that the penalty treats features equally.
Since the linear predictor \(Xw\) can be negative and Poisson,
Gamma and Inverse Gaussian distributions don’t support negative values, it
is necessary to apply an inverse link function that guarantees the
non-negativeness. For example with link='log', the inverse link function
becomes \(h(Xw)=\exp(Xw)\).
If you want to model a relative frequency, i.e. counts per exposure (time, volume, …) you can do so by using a Poisson distribution and passing \(y=\frac{\mathrm{counts}}{\mathrm{exposure}}\) as target values together with \(\mathrm{exposure}\) as sample weights. For a concrete example see e.g. Tweedie regression on insurance claims.
When performing cross-validation for the power parameter of
TweedieRegressor, it is advisable to specify an explicit scoring function,
because the default scorer TweedieRegressor.score is a function of
power itself.
1.1.13. Stochastic Gradient Descent - SGD¶
Stochastic gradient descent is a simple yet very efficient approach
to fit linear models. It is particularly useful when the number of samples
(and the number of features) is very large.
The partial_fit method allows online/out-of-core learning.
The classes SGDClassifier and SGDRegressor provide
functionality to fit linear models for classification and regression
using different (convex) loss functions and different penalties.
E.g., with loss="log", SGDClassifier
fits a logistic regression model,
while with loss="hinge" it fits a linear support vector machine (SVM).
References
1.1.14. Perceptron¶
The Perceptron is another simple classification algorithm suitable for
large scale learning. By default:
It does not require a learning rate.
It is not regularized (penalized).
It updates its model only on mistakes.
The last characteristic implies that the Perceptron is slightly faster to train than SGD with the hinge loss and that the resulting models are sparser.
1.1.15. Passive Aggressive Algorithms¶
The passive-aggressive algorithms are a family of algorithms for large-scale
learning. They are similar to the Perceptron in that they do not require a
learning rate. However, contrary to the Perceptron, they include a
regularization parameter C.
For classification, PassiveAggressiveClassifier can be used with
loss='hinge' (PA-I) or loss='squared_hinge' (PA-II). For regression,
PassiveAggressiveRegressor can be used with
loss='epsilon_insensitive' (PA-I) or
loss='squared_epsilon_insensitive' (PA-II).
References:
“Online Passive-Aggressive Algorithms” K. Crammer, O. Dekel, J. Keshat, S. Shalev-Shwartz, Y. Singer - JMLR 7 (2006)
1.1.16. Robustness regression: outliers and modeling errors¶
Robust regression aims to fit a regression model in the presence of corrupt data: either outliers, or error in the model.
1.1.16.1. Different scenario and useful concepts¶
There are different things to keep in mind when dealing with data corrupted by outliers:
Outliers in X or in y?
Outliers in the y direction
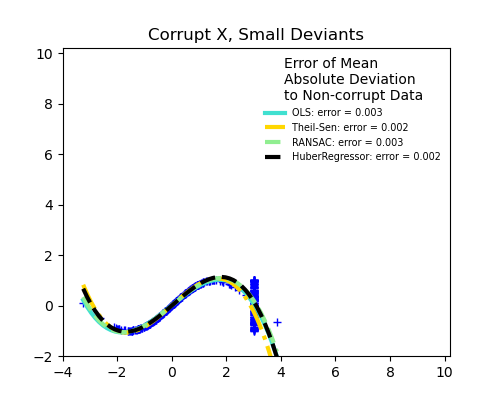
Outliers in the X direction
Fraction of outliers versus amplitude of error
The number of outlying points matters, but also how much they are outliers.
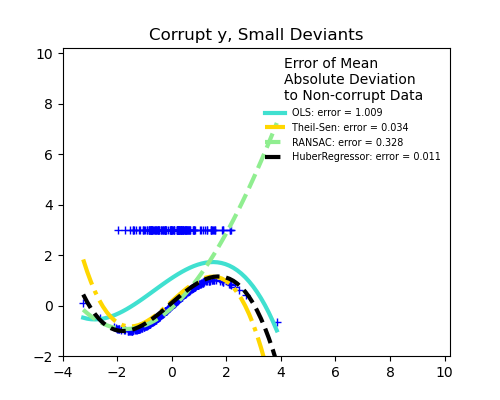
Small outliers
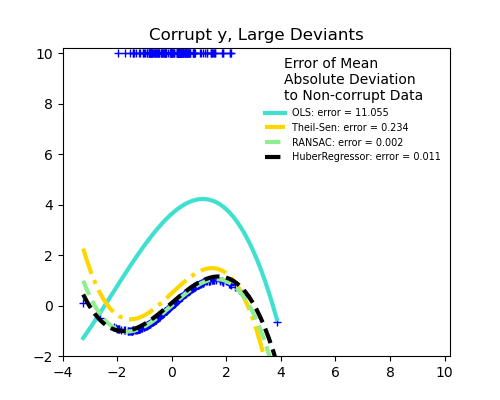
Large outliers
An important notion of robust fitting is that of breakdown point: the fraction of data that can be outlying for the fit to start missing the inlying data.
Note that in general, robust fitting in high-dimensional setting (large
n_features) is very hard. The robust models here will probably not work
in these settings.
Trade-offs: which estimator?
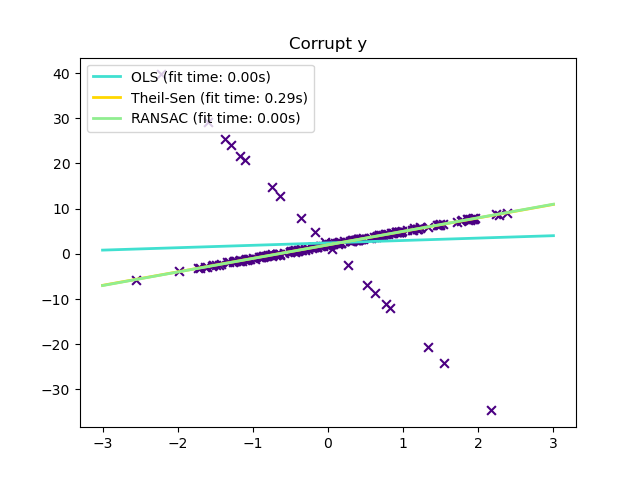
Scikit-learn provides 3 robust regression estimators: RANSAC, Theil Sen and HuberRegressor.
HuberRegressor should be faster than RANSAC and Theil Sen unless the number of samples are very large, i.e
n_samples>>n_features. This is because RANSAC and Theil Sen fit on smaller subsets of the data. However, both Theil Sen and RANSAC are unlikely to be as robust as HuberRegressor for the default parameters.RANSAC is faster than Theil Sen and scales much better with the number of samples.
RANSAC will deal better with large outliers in the y direction (most common situation).
Theil Sen will cope better with medium-size outliers in the X direction, but this property will disappear in high-dimensional settings.
When in doubt, use RANSAC.
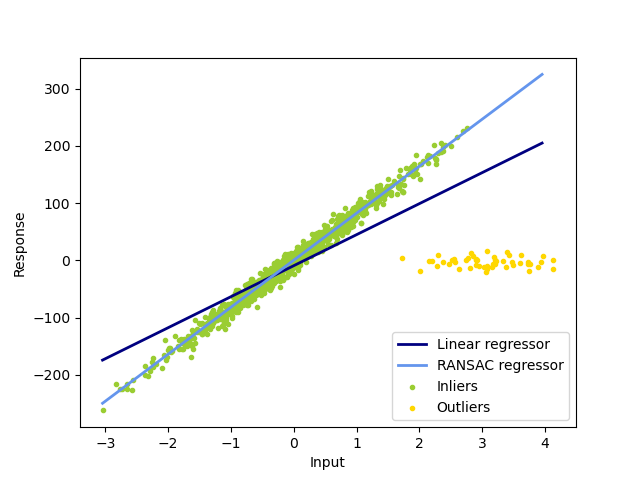
1.1.16.2. RANSAC: RANdom SAmple Consensus¶
RANSAC (RANdom SAmple Consensus) fits a model from random subsets of inliers from the complete data set.
RANSAC is a non-deterministic algorithm producing only a reasonable result with
a certain probability, which is dependent on the number of iterations (see
max_trials parameter). It is typically used for linear and non-linear
regression problems and is especially popular in the field of photogrammetric
computer vision.
The algorithm splits the complete input sample data into a set of inliers, which may be subject to noise, and outliers, which are e.g. caused by erroneous measurements or invalid hypotheses about the data. The resulting model is then estimated only from the determined inliers.
1.1.16.2.1. Details of the algorithm¶
Each iteration performs the following steps:
Select
min_samplesrandom samples from the original data and check whether the set of data is valid (seeis_data_valid).Fit a model to the random subset (
base_estimator.fit) and check whether the estimated model is valid (seeis_model_valid).Classify all data as inliers or outliers by calculating the residuals to the estimated model (
base_estimator.predict(X) - y) - all data samples with absolute residuals smaller than theresidual_thresholdare considered as inliers.Save fitted model as best model if number of inlier samples is maximal. In case the current estimated model has the same number of inliers, it is only considered as the best model if it has better score.
These steps are performed either a maximum number of times (max_trials) or
until one of the special stop criteria are met (see stop_n_inliers and
stop_score). The final model is estimated using all inlier samples (consensus
set) of the previously determined best model.
The is_data_valid and is_model_valid functions allow to identify and reject
degenerate combinations of random sub-samples. If the estimated model is not
needed for identifying degenerate cases, is_data_valid should be used as it
is called prior to fitting the model and thus leading to better computational
performance.
References:
“Random Sample Consensus: A Paradigm for Model Fitting with Applications to Image Analysis and Automated Cartography” Martin A. Fischler and Robert C. Bolles - SRI International (1981)
“Performance Evaluation of RANSAC Family” Sunglok Choi, Taemin Kim and Wonpil Yu - BMVC (2009)
1.1.16.3. Theil-Sen estimator: generalized-median-based estimator¶
The TheilSenRegressor estimator uses a generalization of the median in
multiple dimensions. It is thus robust to multivariate outliers. Note however
that the robustness of the estimator decreases quickly with the dimensionality
of the problem. It loses its robustness properties and becomes no
better than an ordinary least squares in high dimension.
1.1.16.3.1. Theoretical considerations¶
TheilSenRegressor is comparable to the Ordinary Least Squares
(OLS) in terms of asymptotic efficiency and as an
unbiased estimator. In contrast to OLS, Theil-Sen is a non-parametric
method which means it makes no assumption about the underlying
distribution of the data. Since Theil-Sen is a median-based estimator, it
is more robust against corrupted data aka outliers. In univariate
setting, Theil-Sen has a breakdown point of about 29.3% in case of a
simple linear regression which means that it can tolerate arbitrary
corrupted data of up to 29.3%.
The implementation of TheilSenRegressor in scikit-learn follows a
generalization to a multivariate linear regression model 12 using the
spatial median which is a generalization of the median to multiple
dimensions 13.
In terms of time and space complexity, Theil-Sen scales according to
which makes it infeasible to be applied exhaustively to problems with a large number of samples and features. Therefore, the magnitude of a subpopulation can be chosen to limit the time and space complexity by considering only a random subset of all possible combinations.
Examples:
References:
- 12
Xin Dang, Hanxiang Peng, Xueqin Wang and Heping Zhang: Theil-Sen Estimators in a Multiple Linear Regression Model.
- 13
Kärkkäinen and S. Äyrämö: On Computation of Spatial Median for Robust Data Mining.
1.1.16.4. Huber Regression¶
The HuberRegressor is different to Ridge because it applies a
linear loss to samples that are classified as outliers.
A sample is classified as an inlier if the absolute error of that sample is
lesser than a certain threshold. It differs from TheilSenRegressor
and RANSACRegressor because it does not ignore the effect of the outliers
but gives a lesser weight to them.
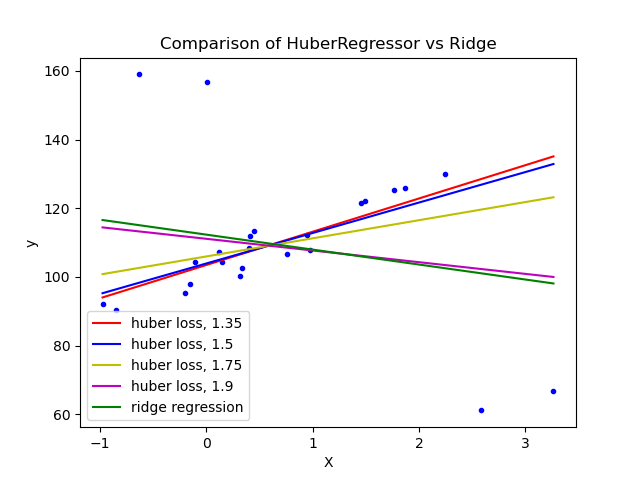
The loss function that HuberRegressor minimizes is given by
where
It is advised to set the parameter epsilon to 1.35 to achieve 95% statistical efficiency.
1.1.16.5. Notes¶
The HuberRegressor differs from using SGDRegressor with loss set to huber
in the following ways.
HuberRegressoris scaling invariant. Onceepsilonis set, scalingXandydown or up by different values would produce the same robustness to outliers as before. as compared toSGDRegressorwhereepsilonhas to be set again whenXandyare scaled.HuberRegressorshould be more efficient to use on data with small number of samples whileSGDRegressorneeds a number of passes on the training data to produce the same robustness.
References:
Peter J. Huber, Elvezio M. Ronchetti: Robust Statistics, Concomitant scale estimates, pg 172
Note that this estimator is different from the R implementation of Robust Regression (http://www.ats.ucla.edu/stat/r/dae/rreg.htm) because the R implementation does a weighted least squares implementation with weights given to each sample on the basis of how much the residual is greater than a certain threshold.
1.1.17. Polynomial regression: extending linear models with basis functions¶
One common pattern within machine learning is to use linear models trained on nonlinear functions of the data. This approach maintains the generally fast performance of linear methods, while allowing them to fit a much wider range of data.
For example, a simple linear regression can be extended by constructing polynomial features from the coefficients. In the standard linear regression case, you might have a model that looks like this for two-dimensional data:
If we want to fit a paraboloid to the data instead of a plane, we can combine the features in second-order polynomials, so that the model looks like this:
The (sometimes surprising) observation is that this is still a linear model: to see this, imagine creating a new set of features
With this re-labeling of the data, our problem can be written
We see that the resulting polynomial regression is in the same class of linear models we considered above (i.e. the model is linear in \(w\)) and can be solved by the same techniques. By considering linear fits within a higher-dimensional space built with these basis functions, the model has the flexibility to fit a much broader range of data.
Here is an example of applying this idea to one-dimensional data, using polynomial features of varying degrees:
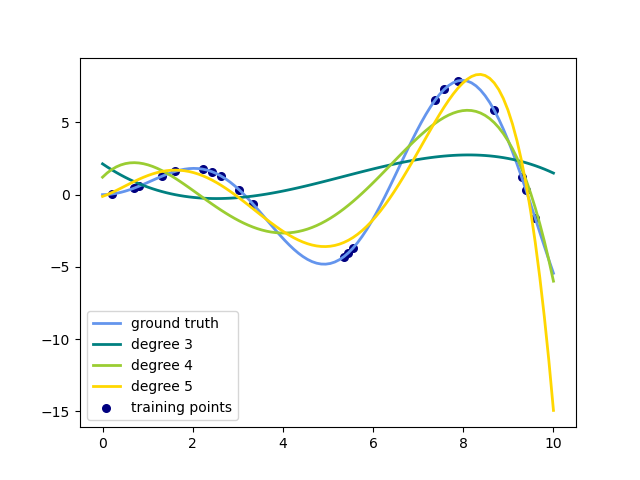
This figure is created using the PolynomialFeatures transformer, which
transforms an input data matrix into a new data matrix of a given degree.
It can be used as follows:
>>> from sklearn.preprocessing import PolynomialFeatures
>>> import numpy as np
>>> X = np.arange(6).reshape(3, 2)
>>> X
array([[0, 1],
[2, 3],
[4, 5]])
>>> poly = PolynomialFeatures(degree=2)
>>> poly.fit_transform(X)
array([[ 1., 0., 1., 0., 0., 1.],
[ 1., 2., 3., 4., 6., 9.],
[ 1., 4., 5., 16., 20., 25.]])
The features of X have been transformed from \([x_1, x_2]\) to
\([1, x_1, x_2, x_1^2, x_1 x_2, x_2^2]\), and can now be used within
any linear model.
This sort of preprocessing can be streamlined with the Pipeline tools. A single object representing a simple polynomial regression can be created and used as follows:
>>> from sklearn.preprocessing import PolynomialFeatures
>>> from sklearn.linear_model import LinearRegression
>>> from sklearn.pipeline import Pipeline
>>> import numpy as np
>>> model = Pipeline([('poly', PolynomialFeatures(degree=3)),
... ('linear', LinearRegression(fit_intercept=False))])
>>> # fit to an order-3 polynomial data
>>> x = np.arange(5)
>>> y = 3 - 2 * x + x ** 2 - x ** 3
>>> model = model.fit(x[:, np.newaxis], y)
>>> model.named_steps['linear'].coef_
array([ 3., -2., 1., -1.])
The linear model trained on polynomial features is able to exactly recover the input polynomial coefficients.
In some cases it’s not necessary to include higher powers of any single feature,
but only the so-called interaction features
that multiply together at most \(d\) distinct features.
These can be gotten from PolynomialFeatures with the setting
interaction_only=True.
For example, when dealing with boolean features, \(x_i^n = x_i\) for all \(n\) and is therefore useless; but \(x_i x_j\) represents the conjunction of two booleans. This way, we can solve the XOR problem with a linear classifier:
>>> from sklearn.linear_model import Perceptron
>>> from sklearn.preprocessing import PolynomialFeatures
>>> import numpy as np
>>> X = np.array([[0, 0], [0, 1], [1, 0], [1, 1]])
>>> y = X[:, 0] ^ X[:, 1]
>>> y
array([0, 1, 1, 0])
>>> X = PolynomialFeatures(interaction_only=True).fit_transform(X).astype(int)
>>> X
array([[1, 0, 0, 0],
[1, 0, 1, 0],
[1, 1, 0, 0],
[1, 1, 1, 1]])
>>> clf = Perceptron(fit_intercept=False, max_iter=10, tol=None,
... shuffle=False).fit(X, y)
And the classifier “predictions” are perfect:
>>> clf.predict(X)
array([0, 1, 1, 0])
>>> clf.score(X, y)
1.0