Note
Click here to download the full example code or to run this example in your browser via Binder
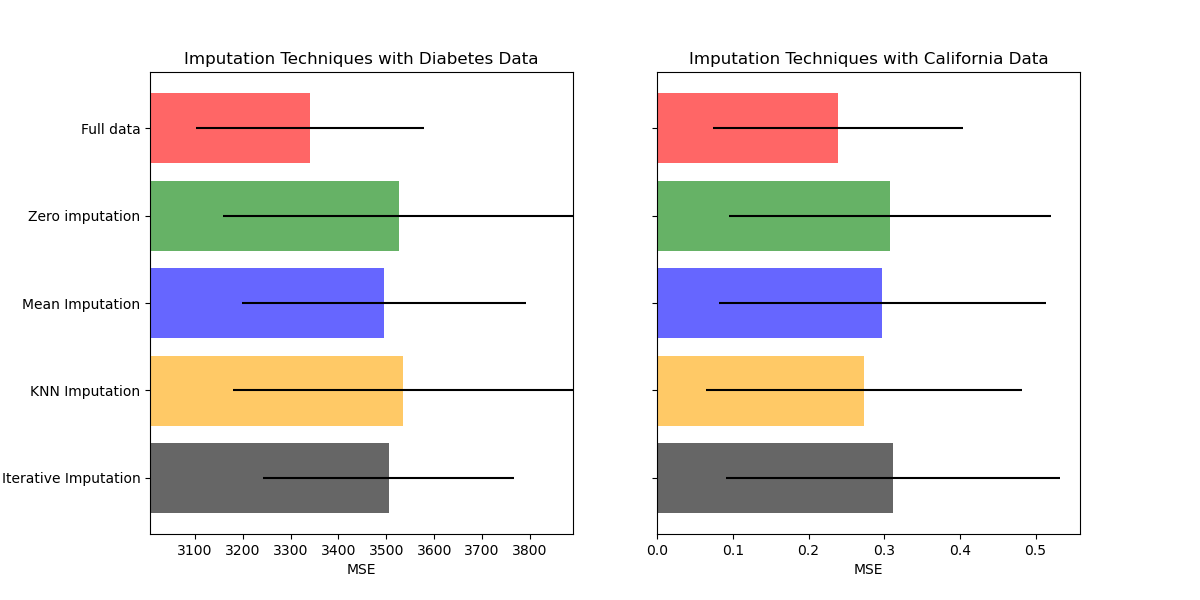
Imputing missing values before building an estimator¶
Missing values can be replaced by the mean, the median or the most frequent
value using the basic sklearn.impute.SimpleImputer.
In this example we will investigate different imputation techniques:
imputation by the constant value 0
imputation by the mean value of each feature combined with a missing-ness indicator auxiliary variable
k nearest neighbor imputation
iterative imputation
We will use two datasets: Diabetes dataset which consists of 10 feature variables collected from diabetes patients with an aim to predict disease progression and California Housing dataset for which the target is the median house value for California districts.
As neither of these datasets have missing values, we will remove some
values to create new versions with artificially missing data. The performance
of
RandomForestRegressor on the full original dataset
is then compared the performance on the altered datasets with the artificially
missing values imputed using different techniques.
print(__doc__)
# Authors: Maria Telenczuk <https://github.com/maikia>
# License: BSD 3 clause
Download the data and make missing values sets¶
First we download the two datasets. Diabetes dataset is shipped with scikit-learn. It has 442 entries, each with 10 features. California Housing dataset is much larger with 20640 entries and 8 features. It needs to be downloaded. We will only use the first 400 entries for the sake of speeding up the calculations but feel free to use the whole dataset.
import numpy as np
from sklearn.datasets import fetch_california_housing
from sklearn.datasets import load_diabetes
rng = np.random.RandomState(42)
X_diabetes, y_diabetes = load_diabetes(return_X_y=True)
X_california, y_california = fetch_california_housing(return_X_y=True)
X_california = X_california[:400]
y_california = y_california[:400]
def add_missing_values(X_full, y_full):
n_samples, n_features = X_full.shape
# Add missing values in 75% of the lines
missing_rate = 0.75
n_missing_samples = int(n_samples * missing_rate)
missing_samples = np.zeros(n_samples, dtype=np.bool)
missing_samples[: n_missing_samples] = True
rng.shuffle(missing_samples)
missing_features = rng.randint(0, n_features, n_missing_samples)
X_missing = X_full.copy()
X_missing[missing_samples, missing_features] = np.nan
y_missing = y_full.copy()
return X_missing, y_missing
X_miss_california, y_miss_california = add_missing_values(
X_california, y_california)
X_miss_diabetes, y_miss_diabetes = add_missing_values(
X_diabetes, y_diabetes)
Impute the missing data and score¶
Now we will write a function which will score the results on the differently imputed data. Let’s look at each imputer separately:
rng = np.random.RandomState(0)
from sklearn.ensemble import RandomForestRegressor
# To use the experimental IterativeImputer, we need to explicitly ask for it:
from sklearn.experimental import enable_iterative_imputer # noqa
from sklearn.impute import SimpleImputer, KNNImputer, IterativeImputer
from sklearn.model_selection import cross_val_score
from sklearn.pipeline import make_pipeline
N_SPLITS = 5
regressor = RandomForestRegressor(random_state=0)
Missing information¶
In addition to imputing the missing values, the imputers have an
add_indicator parameter that marks the values that were missing, which
might carry some information.
def get_scores_for_imputer(imputer, X_missing, y_missing):
estimator = make_pipeline(imputer, regressor)
impute_scores = cross_val_score(estimator, X_missing, y_missing,
scoring='neg_mean_squared_error',
cv=N_SPLITS)
return impute_scores
x_labels = ['Full data',
'Zero imputation',
'Mean Imputation',
'KNN Imputation',
'Iterative Imputation']
mses_california = np.zeros(5)
stds_california = np.zeros(5)
mses_diabetes = np.zeros(5)
stds_diabetes = np.zeros(5)
Estimate the score¶
First, we want to estimate the score on the original data:
def get_full_score(X_full, y_full):
full_scores = cross_val_score(regressor, X_full, y_full,
scoring='neg_mean_squared_error',
cv=N_SPLITS)
return full_scores.mean(), full_scores.std()
mses_california[0], stds_california[0] = get_full_score(X_california,
y_california)
mses_diabetes[0], stds_diabetes[0] = get_full_score(X_diabetes, y_diabetes)
Replace missing values by 0¶
Now we will estimate the score on the data where the missing values are replaced by 0:
def get_impute_zero_score(X_missing, y_missing):
imputer = SimpleImputer(missing_values=np.nan, add_indicator=True,
strategy='constant', fill_value=0)
zero_impute_scores = get_scores_for_imputer(imputer, X_missing, y_missing)
return zero_impute_scores.mean(), zero_impute_scores.std()
mses_california[1], stds_california[1] = get_impute_zero_score(
X_miss_california, y_miss_california)
mses_diabetes[1], stds_diabetes[1] = get_impute_zero_score(X_miss_diabetes,
y_miss_diabetes)
kNN-imputation of the missing values¶
sklearn.impute.KNNImputer imputes missing values using the weighted
or unweighted mean of the desired number of nearest neighbors.
def get_impute_knn_score(X_missing, y_missing):
imputer = KNNImputer(missing_values=np.nan, add_indicator=True)
knn_impute_scores = get_scores_for_imputer(imputer, X_missing, y_missing)
return knn_impute_scores.mean(), knn_impute_scores.std()
mses_california[2], stds_california[2] = get_impute_knn_score(
X_miss_california, y_miss_california)
mses_diabetes[2], stds_diabetes[2] = get_impute_knn_score(X_miss_diabetes,
y_miss_diabetes)
Impute missing values with mean¶
def get_impute_mean(X_missing, y_missing):
imputer = SimpleImputer(missing_values=np.nan, strategy="mean",
add_indicator=True)
mean_impute_scores = get_scores_for_imputer(imputer, X_missing, y_missing)
return mean_impute_scores.mean(), mean_impute_scores.std()
mses_california[3], stds_california[3] = get_impute_mean(X_miss_california,
y_miss_california)
mses_diabetes[3], stds_diabetes[3] = get_impute_mean(X_miss_diabetes,
y_miss_diabetes)
Iterative imputation of the missing values¶
Another option is the sklearn.impute.IterativeImputer. This uses
round-robin linear regression, modeling each feature with missing values as a
function of other features, in turn.
The version implemented assumes Gaussian (output) variables. If your features
are obviously non-normal, consider transforming them to look more normal
to potentially improve performance.
def get_impute_iterative(X_missing, y_missing):
imputer = IterativeImputer(missing_values=np.nan, add_indicator=True,
random_state=0, n_nearest_features=5,
sample_posterior=True)
iterative_impute_scores = get_scores_for_imputer(imputer,
X_missing,
y_missing)
return iterative_impute_scores.mean(), iterative_impute_scores.std()
mses_california[4], stds_california[4] = get_impute_iterative(
X_miss_california, y_miss_california)
mses_diabetes[4], stds_diabetes[4] = get_impute_iterative(X_miss_diabetes,
y_miss_diabetes)
mses_diabetes = mses_diabetes * -1
mses_california = mses_california * -1
Plot the results¶
Finally we are going to visualize the score:
import matplotlib.pyplot as plt
n_bars = len(mses_diabetes)
xval = np.arange(n_bars)
colors = ['r', 'g', 'b', 'orange', 'black']
# plot diabetes results
plt.figure(figsize=(12, 6))
ax1 = plt.subplot(121)
for j in xval:
ax1.barh(j, mses_diabetes[j], xerr=stds_diabetes[j],
color=colors[j], alpha=0.6, align='center')
ax1.set_title('Imputation Techniques with Diabetes Data')
ax1.set_xlim(left=np.min(mses_diabetes) * 0.9,
right=np.max(mses_diabetes) * 1.1)
ax1.set_yticks(xval)
ax1.set_xlabel('MSE')
ax1.invert_yaxis()
ax1.set_yticklabels(x_labels)
# plot california dataset results
ax2 = plt.subplot(122)
for j in xval:
ax2.barh(j, mses_california[j], xerr=stds_california[j],
color=colors[j], alpha=0.6, align='center')
ax2.set_title('Imputation Techniques with California Data')
ax2.set_yticks(xval)
ax2.set_xlabel('MSE')
ax2.invert_yaxis()
ax2.set_yticklabels([''] * n_bars)
plt.show()
# You can also try different techniques. For instance, the median is a more
# robust estimator for data with high magnitude variables which could dominate
# results (otherwise known as a 'long tail').
Total running time of the script: ( 0 minutes 15.287 seconds)